
風力タービンの Yaw のズレとは何ですか?
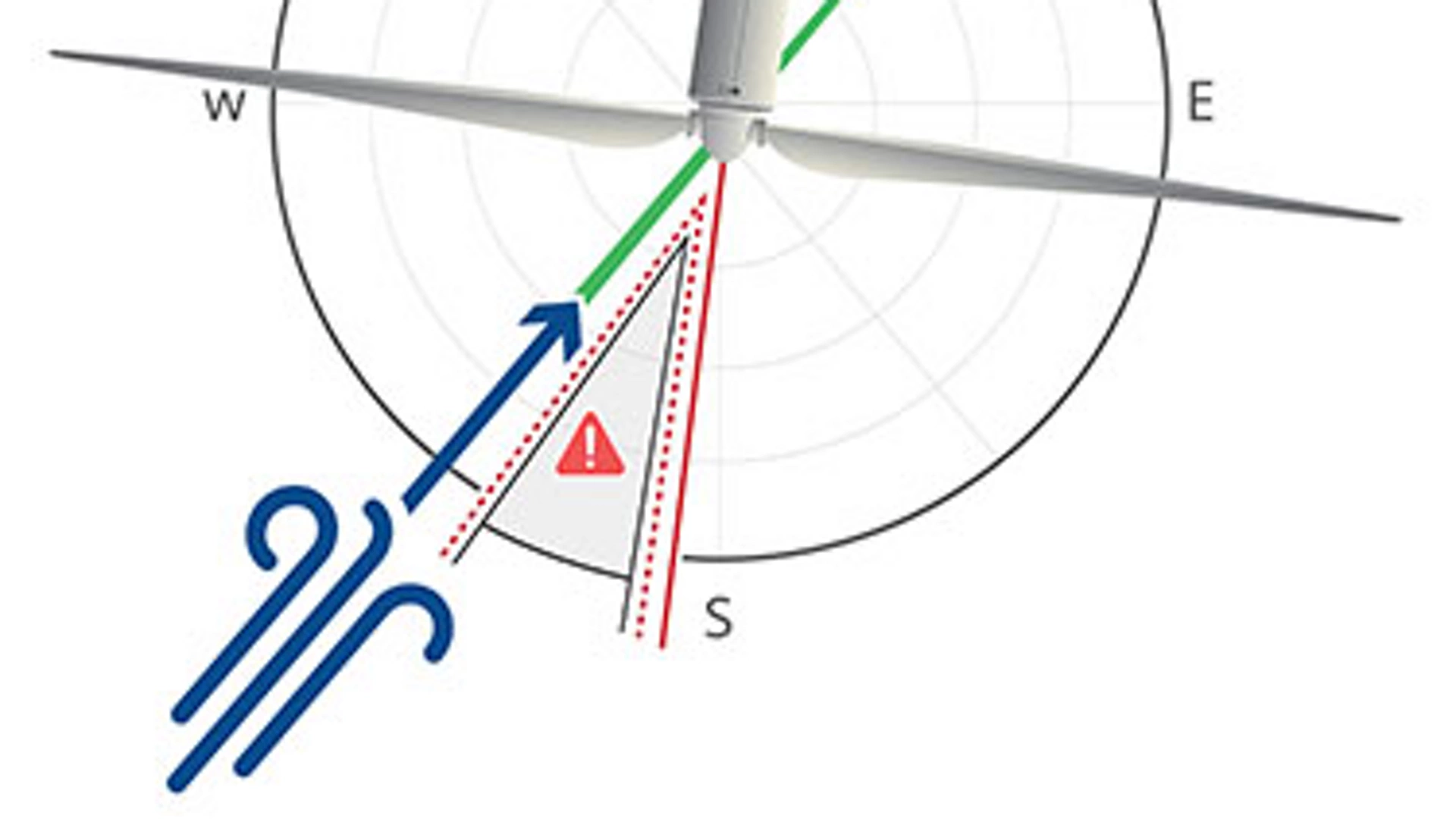
Yaw のズレは、風力タービンのローターとブレードが風に正対していない場合に発生します。 風力タービンは、風の方向に対して正確に垂直に配置するのが理想的です。 この位置にある場合、風力タービンは、風の流れから最大のエネルギー量を受け取ります。
ほとんどの風力タービンにはある程度の Yaw のズレが発生し、それによって発電量が低下します。 Yaw が 8 度ずれている場合、風力タービンの年間エネルギー生産(AEP)は約 2 % 減少する可能性があります。 Yaw のズレは、タービンの機械システムに不要な歪みや摩耗を引き起こし、その寿命を縮める可能性があります。
Yaw のズレを引き起こす原因は何ですか?
Yaw のズレを引き起こす可能性のある要因は複数あります。 その一般的な要因の 1 つとして、風向計と Yaw ポジショニングシステムの方向校正が不正確だった場合が挙げられます。 これは通常、Yaw システムの摩耗や破損によって引き起こされる機械的問題に由来します。
もう 1 つの一般的な要因としては、風の方向検出が不正確だった場合が挙げられます。 これは、ナセルアネメーターが回転する風力タービンブレードによって生じる乱流に遭遇したときに起きる可能性があります。
最後に、タービンをいつどのようにヨーイングするかを規定する制御システムの設定に欠陥がある場合も、位置ズレが発生する原因となる可能性があります。 これらの要因の多くは、システムの経年劣化に起因します。
Yaw のズレを検出する方法とは?
Yaw のズレは通常、2 つのメソッドのいずれかによって検出されます。 一方のメソッドは、風力タービンに LiDAR システムを取り付けるメソッドです。 こうすることで、回転するブレードが「旋回」する前に、風の速度とその方向の両方を正確に読み取ることができます。 しかし、風力発電所が大規模な場合、この方法は高額なアプローチとなる可能性があります。
もう一方のメソッドは、対象の風力タービンの近くにあるタワーで独立したアネメーターを利用し、読み取り値をユニットのセンサと比較するメソッドです。
どちらのメソッドにも時間がかかるわりに、これらによって提供されるのは参照データのみです。 このため多くの場合、Yaw のズレ検出のニーズが、フルパワー出力を生成する正確な Yaw 位置を自動的に見つけるアドバンスト制御アルゴリズムに取って変わられます。
Yaw のズレはどうやって修正しますか?
最新のタービン制御システムの改良では、アドバンスト制御ロジックを利用して、ズレによって生じるタービンの最適でない性能を軽減します。 Yaw の自己校正制御アルゴリズムは、静的な Yaw のズレを検出し、タービンが潜在能力を最大限に発揮できるように、調整を継続的に実施します。
エマソンでは、標準的な風力タービン制御システム改造の一環として、Yaw の自己校正制御アルゴリズムを組み込んでいます。 これには追加のセンサは不要です。 機械学習で構成されるこのアルゴリズムの場合、インストール後の自動校正に必要な期間は通常たったの 2 週間です。 風向計と Yaw の校正がシフトしたり劣化したりした場合は、適応し、自動修正します。
その結果、ローターの位置が正確で、タービン発電機の電力性能が最適化された風力タービンが実現します。 Emerson の改造を実施すると、タービンの寿命が延び、通常年間生産が 3~5 % 増加するため、1 年以内に見返りを得ることができます。 詳細については、当社の風力タービンの改造ページをご参照ください。